E-Lab: Control of balancing Bi-copter mechanism and Ball and beam mechanism via an online website
Bachelor Projects
|
Labs are the heart
of Engineering education where an engineer practices the theoretical concepts
and sense the experiments by himself. In
order to make use of the internet technology, scientists put their sights on a
new type of labs that emerged recently and put great efforts on developing such
labs that will allow all engineers to use labs and implement experiments
whenever they want and wherever they are .
The new type of labs is the Remote Labs. So in order to keep up with this new research area, this thesis is proposed to implement a remote lab in The German University in Cairo that can connect all the engineers all over the world and help them to implement their experiments through this remote lab with minimum cost and maximum efficiency. The thesis also implements two experiments which are: Controlling of balancing BI-Copter mechanism and control of ball and beam mechanism. This project was done by Catherein Ibrahim and Abdallah Rashwan.
|
Catherein Malak Ibrahim

Abdallah Hamdi Rashwan

|


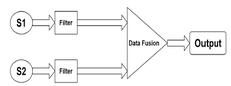
Multi-modal mobile sensor data fusion for autonomous robot mapping problem
|
The topic of data
fusion has been under extensive research in the past decade. Many approaches
have been suggested and yet the research on data fusion is increasing and this
is because of its importance in a lot of applications. It is used in military
applications, in medicine and robotics. This thesis discusses the use of probabilistic
data fusion to reduce the uncertainty and noise of the measurements coming from
active Sensors and to improve the mapping and localization of mobile robots. The
data fusion methods used were Kalman filter and Bayes filter. Promising results
were achieved from this fusion.
This project was done by Mohamed Hussein Kassem.
|
Mohamed Hussein Kassem

|

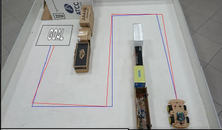
Tele-operated control of an indoor navigating mobile robot for surveillance tasks
|
It has been
a challenging task over the past few decades to develop a moving robot that is
capable to navigate under the instructions of its user to do a certain intended
job. Mobile robots were developed to work in different environments to do a job
that is hard or dangerous for a human being to do.
In this study, a mobile robot was developed to do the job of surveillance. The mobile robot is controlled by Tele-operation technique which uses the WiFi to transmit data to the mobile robot by the user to move along a certain path . This project was done by Mohamed Sameh
|
Mohamed Sameh Al-Awaad

|

Decentralized control of multi-robot system for traffic intersection control
|
For the past three
decades, traffic congestion has become one of today's challenging problems. One
of the main causes of this problem is intersections. For minimizing the congestion,
we need to manage intersections in a proper way. In this study, a
decentralized control approach is proposed to control traffic flow in intersections for a traffic network. Treating the problem as a Multi-agent System (MAS), Driver Agents (DA) inhibit the traffic environment. Via the safe zone technique, it is possible to achieve maximum utilization of the intersection environment with avoiding any predicted collisions. This project was done by Andrew Edward Nashed
|
Andrew Edward Nahsed

|


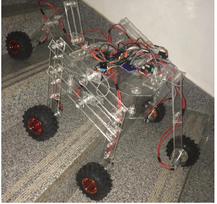
Stair climbing robot with minimal fluctuations
|
Today, because of
mechanical advances of robotic applications in human life, it is important to
overcome regular and virtual impediments, for example, stairs which are the most
known obstructions to the movement of such robots. A few research have been led
toward the configuration of stair climbing and obstacle traversing robots. Various
robots have been constructed for climbing stairs and navigating obstructions,
for example, quadruped and hexapod robots. In this thesis, we present the stair
climbing robot mechanism with minimal fluctuations.
This project is done by Bishoy Boles
|
Bishoy Abdel-Messeh Boles

|

Design and Development of multi robot platform with open configuration
|
The problems concerning robotics have been
around for several years and as the complexity of robots continues to improve,
so does the complexity of the problems that arise as a result. The main problem
facing robotics is the method of their control. Several approaches have been
taken and theories have been developed and extended in the fields of
kinematics, dynamics, and control for different types of robots. This thesis
presents cooperative dual arm control. The focus is on the fundamental
properties of closed-configurations that represent multiple robot arms
manipulating a commonly held task object, together with some of the control and
kinematics issues that arise as a consequent of these properties. Solutions are
developed for both the inverse and forward kinematics.
This project is done by Lobna Hesham
|
Lobna Hesham
|


