Smart Performative Neighborhood. Comfort Home for Living.
(Architecture – Mechatronics) Interdisciplinary Internship
Multi-Robot Systems (MRS) Research Group
Scope
There are many global initiatives nowadays calling for the design of low-carbon emission buildings and outdoor areas from an environmental perspective. In an interdisciplinary cooperation, this internship bonds between Architecture and Mechatronics Engineering (Autonomous Control Lab) disciplines at the German University in Cairo. The aim of this internship is to design and build a smart and performative neighborhood - physical model - prototype that is autonomously easily-accessed and circulated by controlled vehicles.
With respect to the inhabitants’ occupancy schedules, the neighborhood buildings could play a vital role in maximizing the outdoor performance. Thus, the outdoor areas will stem its efficiency from the design of the neighborhood, in terms of environmental design adaptable to the occupant schedule/s. This will provide comfort conditions to the users, reduce the heat island effects, and therefore; contribute to diminishing the energy consumption and carbon emissions, on long-term.
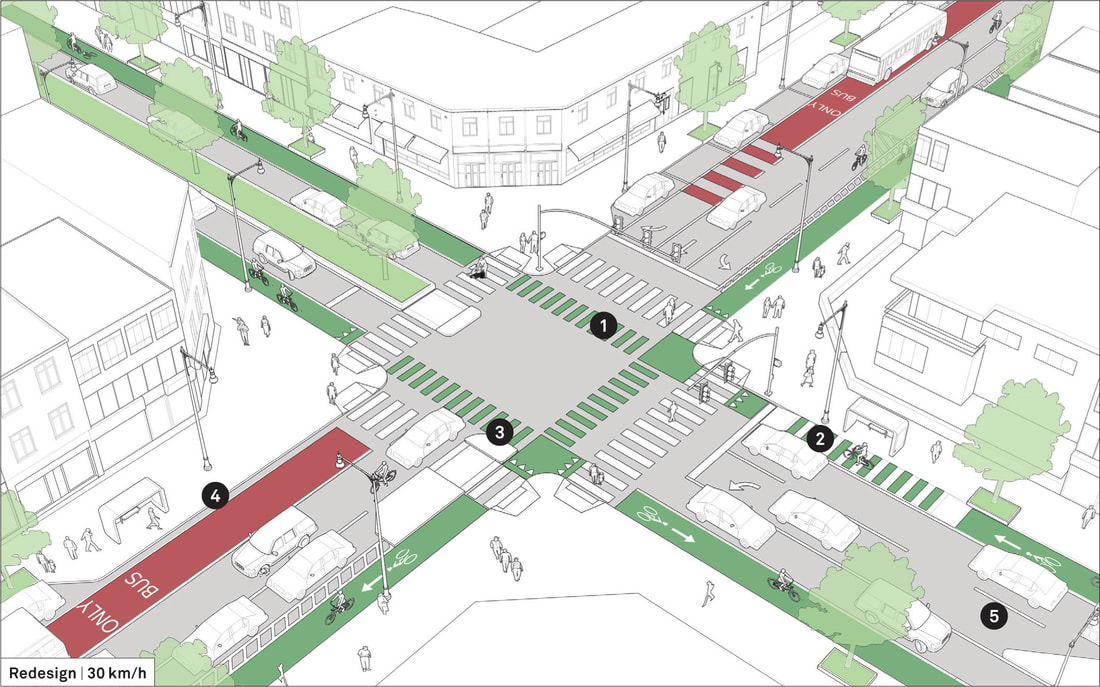
The neighborhood will be enclosed by a typical traffic junction to simulate real-traffic situation looped by perimeter roads. The mobility of the vehicles circulating the neighborhood will be monitored and controlled using advanced autonomous control methods.
Students will design the neighborhood, conceptually, comprising buildings, landscape and outdoor activities as well as the design for vehicle maneuvering and traffic control. Moreover, they will use evidence-based simulation tools to achieve the required performance. This is followed by constructing an architectural detailed-physical model for the neighborhood buildings and traffic junctions.
With respect to the inhabitants’ occupancy schedules, the neighborhood buildings could play a vital role in maximizing the outdoor performance. Thus, the outdoor areas will stem its efficiency from the design of the neighborhood, in terms of environmental design adaptable to the occupant schedule/s. This will provide comfort conditions to the users, reduce the heat island effects, and therefore; contribute to diminishing the energy consumption and carbon emissions, on long-term.
The neighborhood will be enclosed by a typical traffic junction to simulate real-traffic situation looped by perimeter roads. The mobility of the vehicles circulating the neighborhood will be monitored and controlled using advanced autonomous control methods.
Students will design the neighborhood, conceptually, comprising buildings, landscape and outdoor activities as well as the design for vehicle maneuvering and traffic control. Moreover, they will use evidence-based simulation tools to achieve the required performance. This is followed by constructing an architectural detailed-physical model for the neighborhood buildings and traffic junctions.
How To Apply?
Model-Making skill is required.
Grasshopper parametric modeling experience is preferable.
To apply: please send your resume and 10 photo samples for model-making to [email protected].
Duration: 3 weeks, starting 12th Jan, 2020
Application Deadline: Saturday, 11th Jan, 2020
Available Place: 10 positions only.
Grasshopper parametric modeling experience is preferable.
To apply: please send your resume and 10 photo samples for model-making to [email protected].
Duration: 3 weeks, starting 12th Jan, 2020
Application Deadline: Saturday, 11th Jan, 2020
Available Place: 10 positions only.
More info:
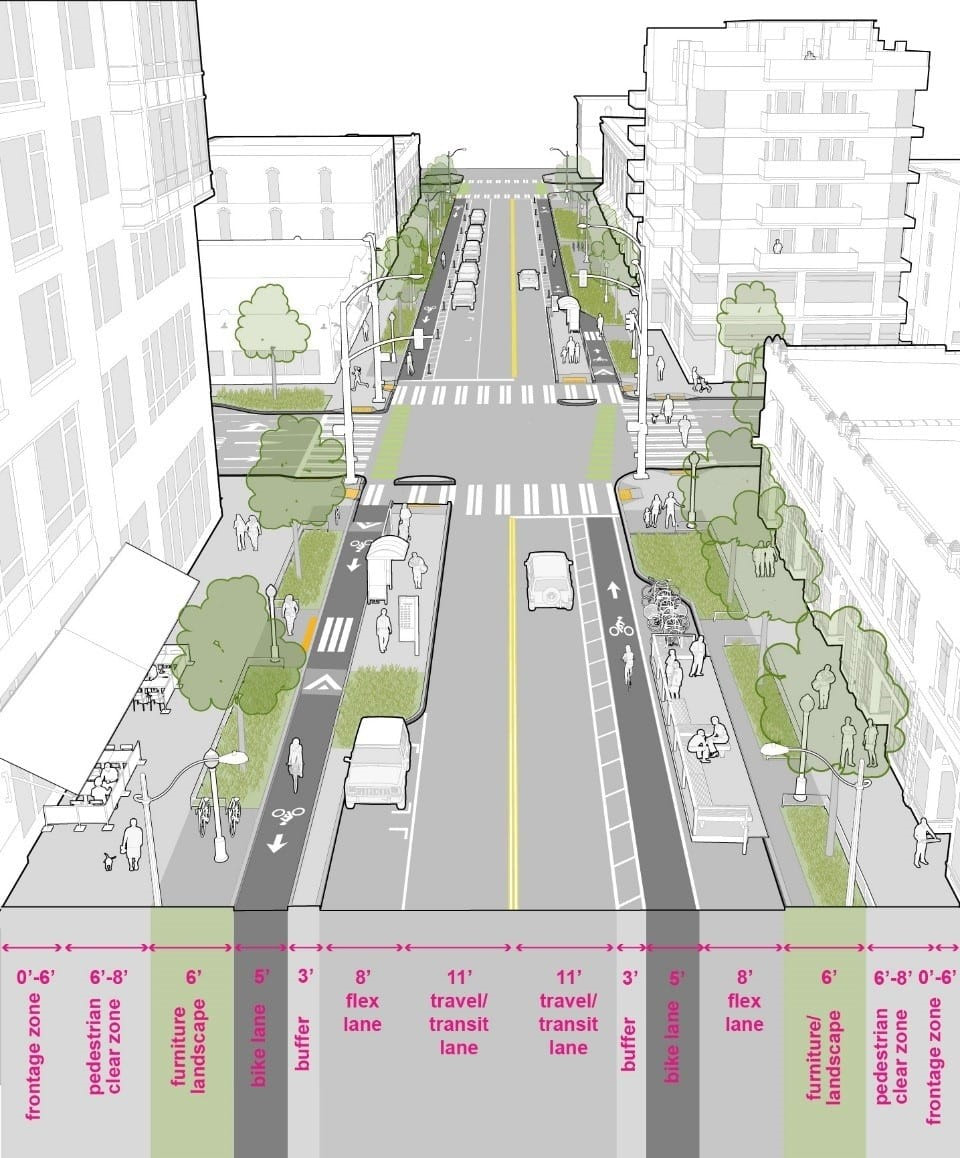
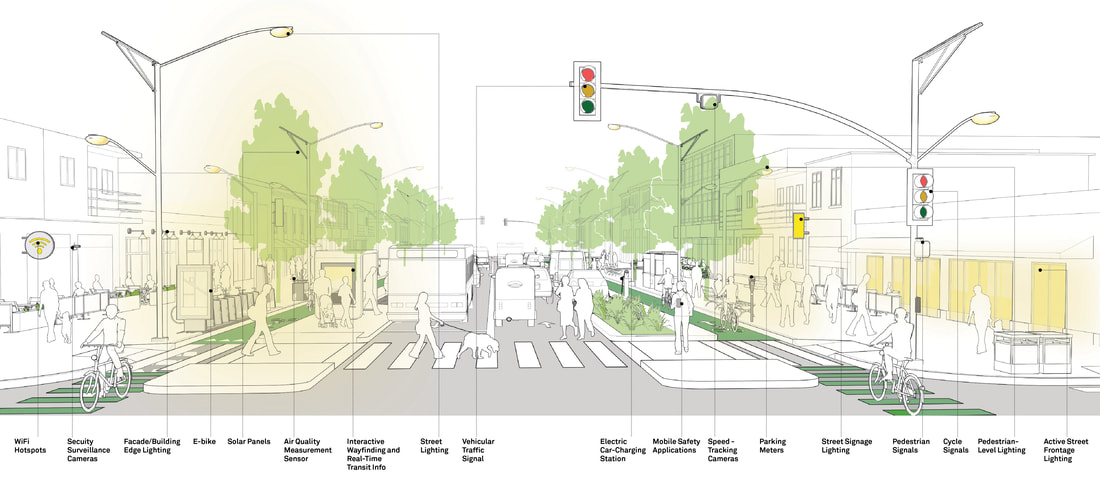
The below figures might provide more insights...
References for Figures
- Seattle’s Future Streets, Seattle.gov, SDOT Blog, department of transportation
https://sdotblog.seattle.gov/2017/05/11/seattles-future-streets/ - Lighting and Technology, Global Designing Cities Initiative.
https://globaldesigningcities.org/publication/global-street-design-guide/utilities-and-infrastructure/lighting-and-technology/ - https://sosyalforum.org/
- https://www.grasshopper3d.com/
- http://ceedtut.blogspot.com/
- https://www.aikonakano.com/mit_netzero.php
Contacts
|
Architecture Team:
Prof. Dr. José Madrigal Assoc. Prof. Silvia Covarino MSc. Arch. Mina Ishac [email protected] |
